Final: Robot Arm



Inspiration
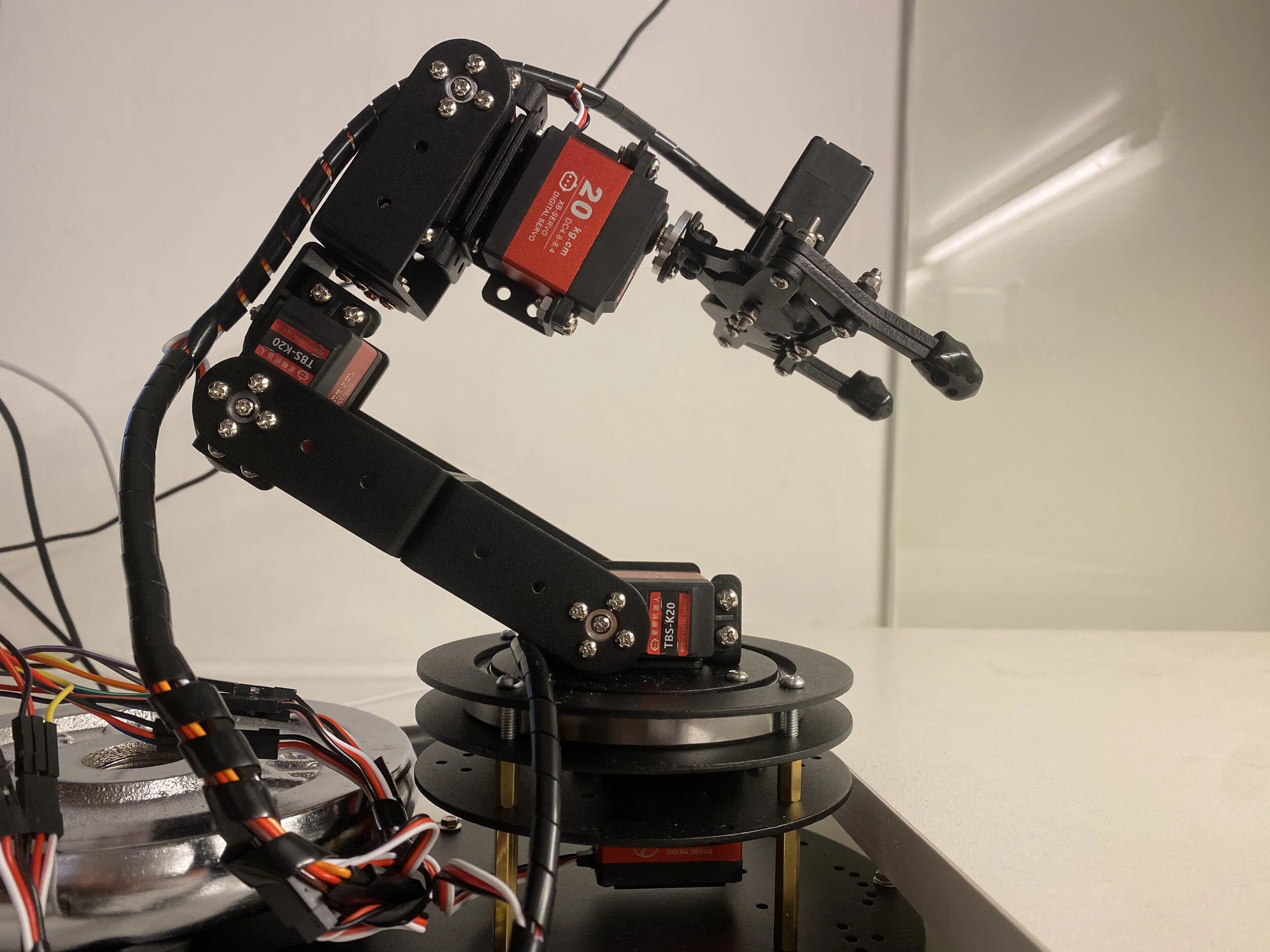
I switched my final project idea because I worked with a simple preassembled robot arm made with six digital servos for a couple of weeks. And I was not too fond of the look of this arm with exposed wires, frames, and motors. It was also inspired by the most expensive monitor stand made by Apple. I wanted to bring those hinge designs to a robot arm. A slick and simple appearance that hides all the complications inside.

Process
I first sketched out all the joints and arms, so I could come back to modify the sizes if needed.
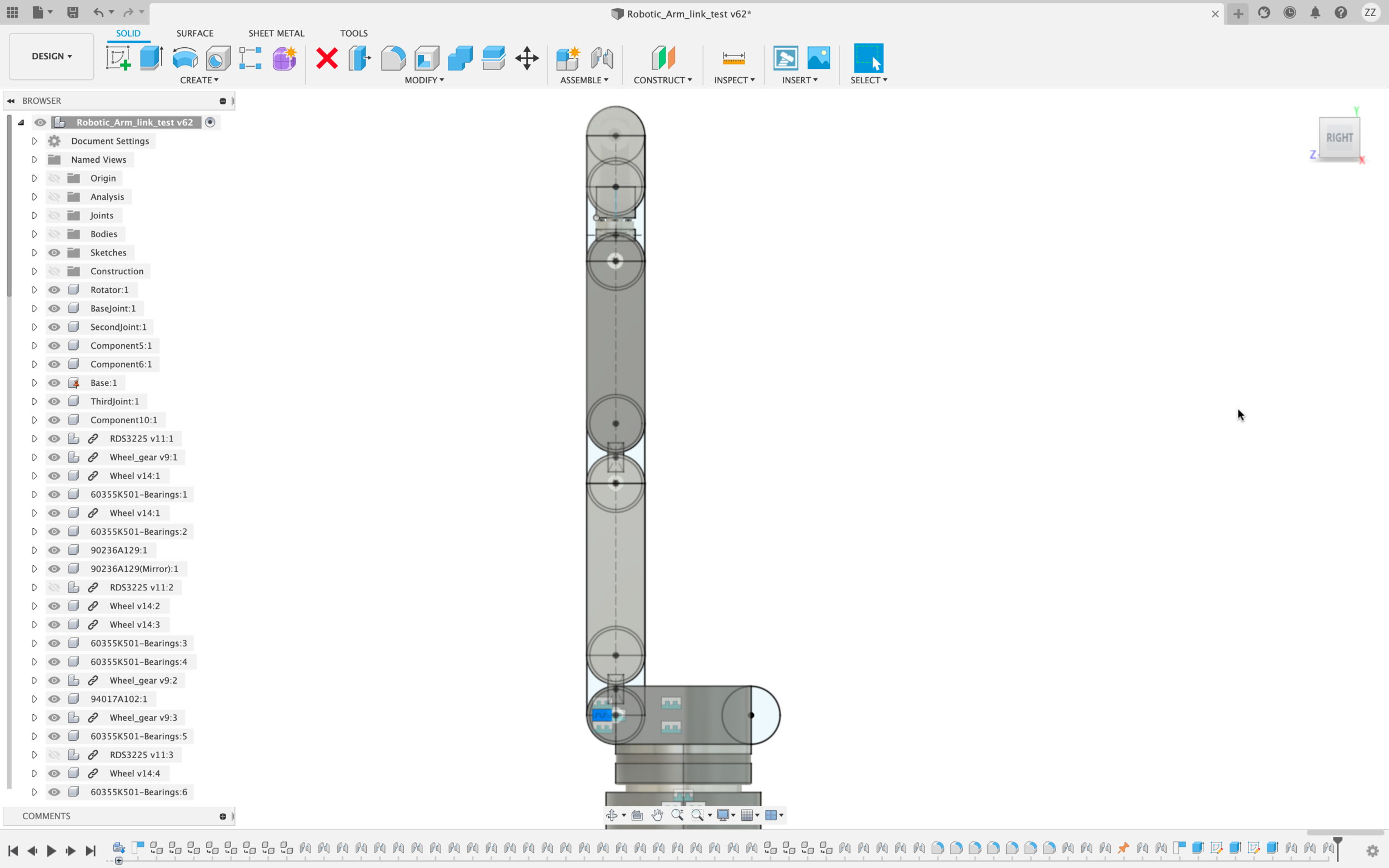
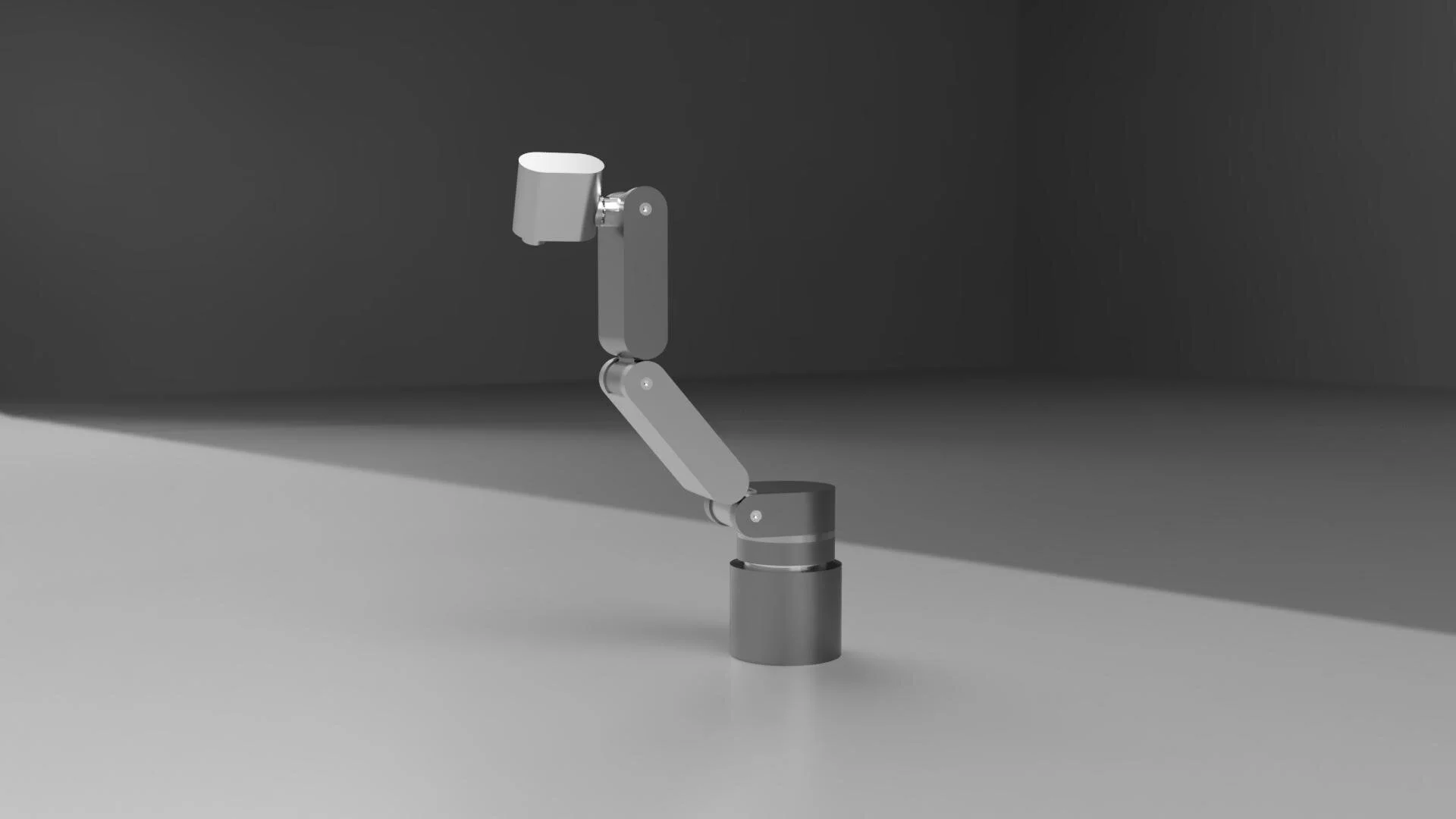
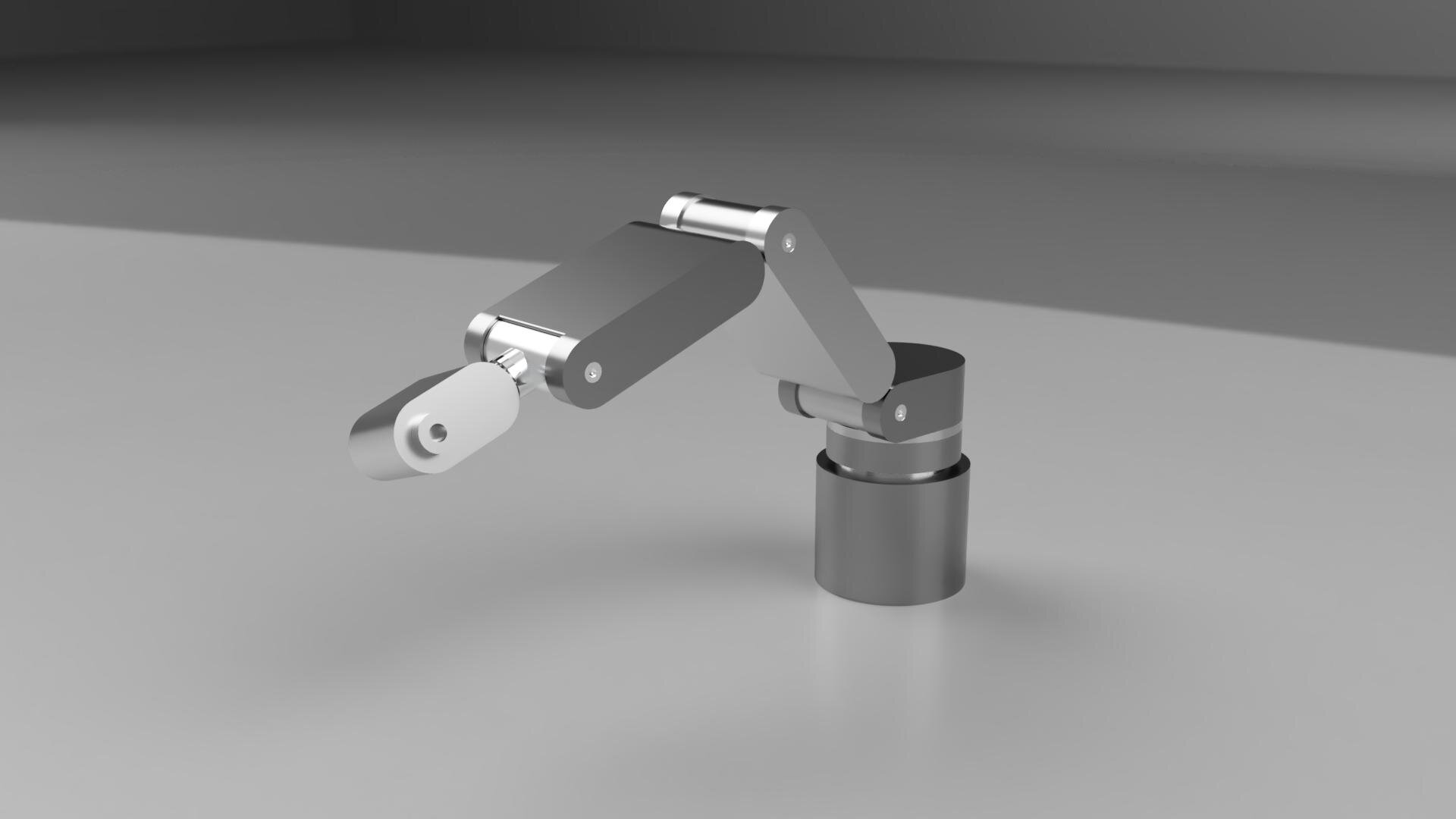
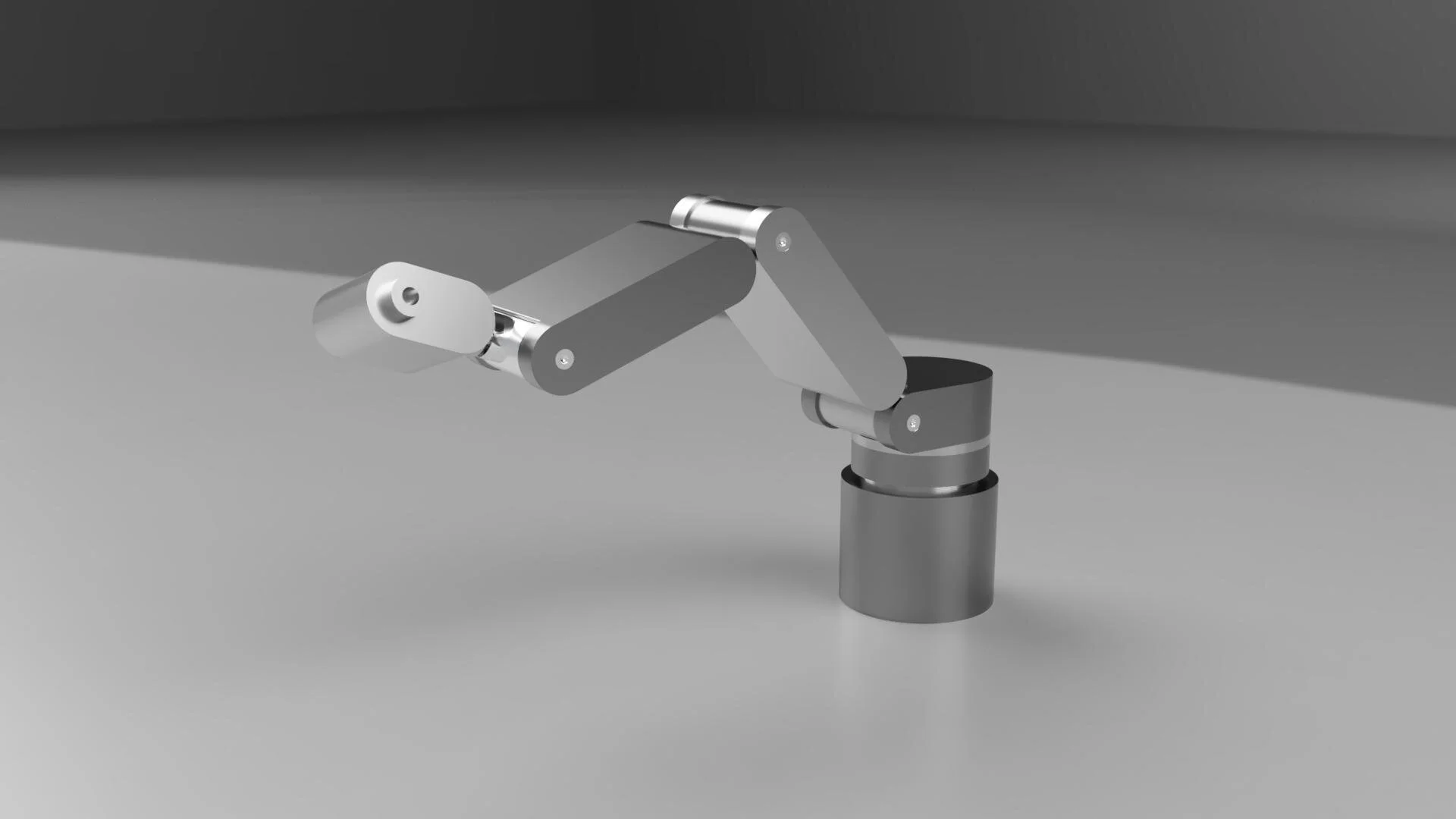
Each joint includes an outer shield that wraps around the smaller inner rotation tube.
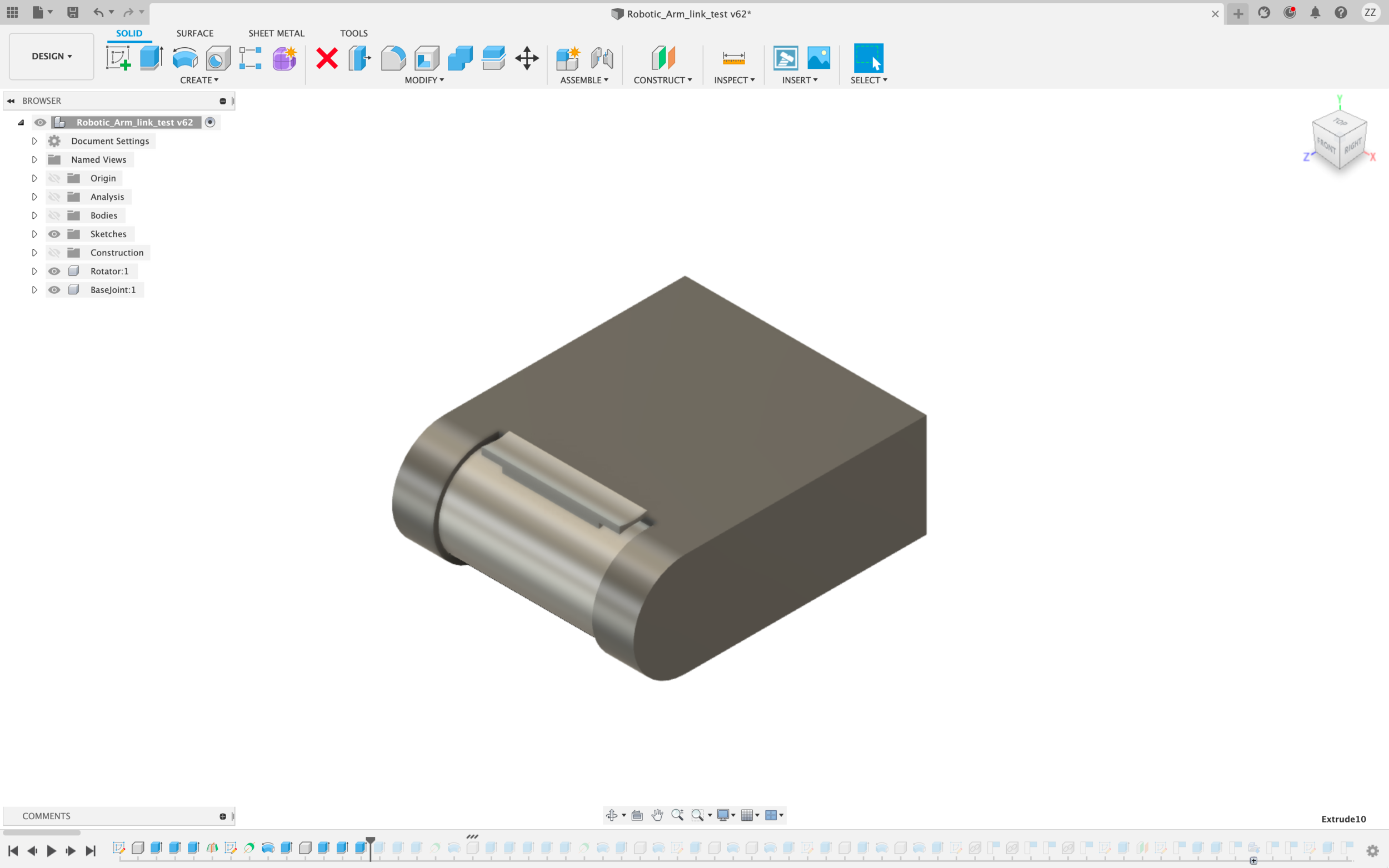
I first extrude the entire section of that arm and then cut out space for the rotation tubing.


I have then added on a connector linking the next section of the arm. I fleshed out the squared block to a rounded shape, seamlessly connecting with the rotation base at the bottom.


The design of the head is open-ended. I left a connector for future addons, like a suction cup or a grabbing claw.

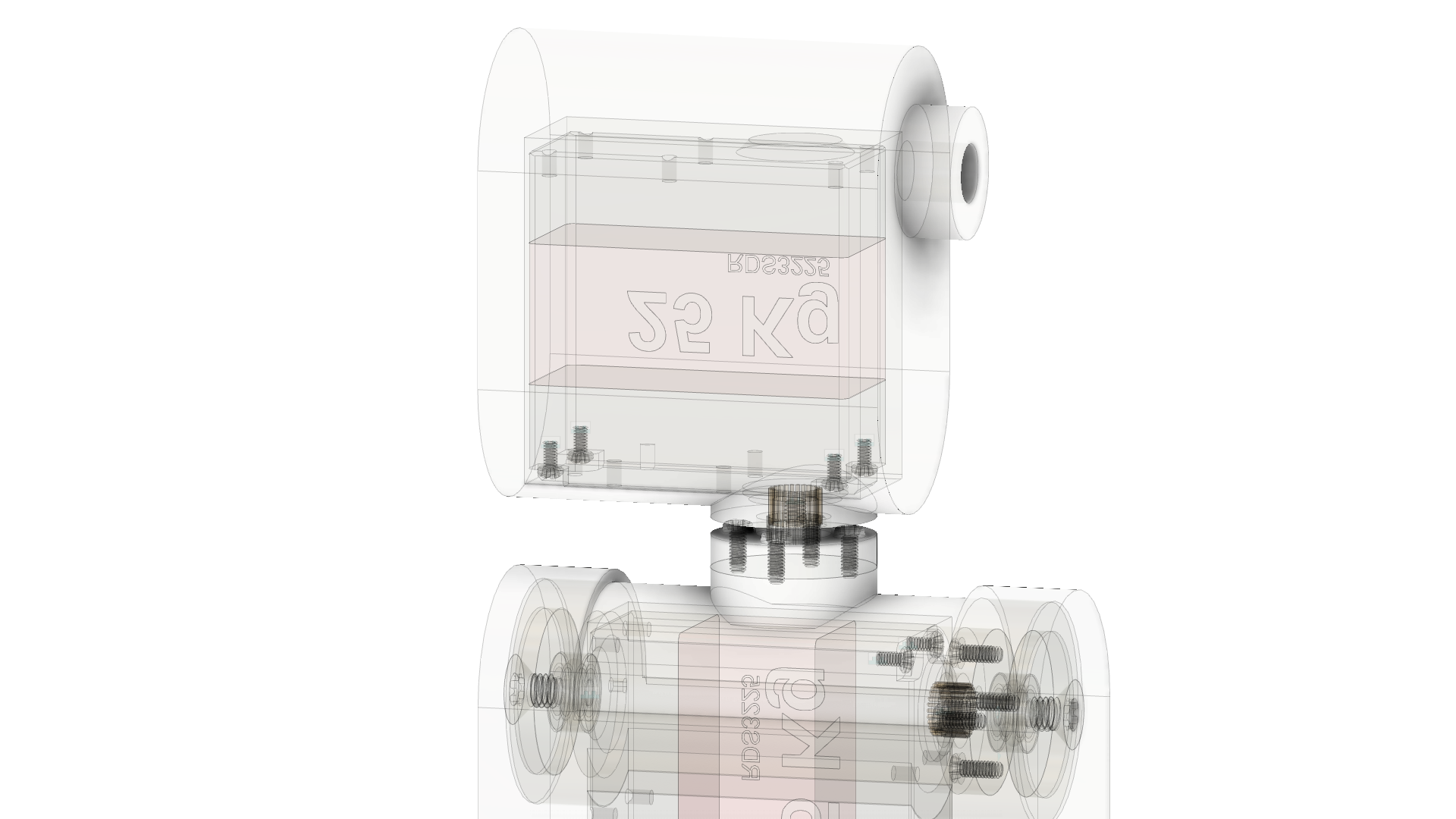
Inner design
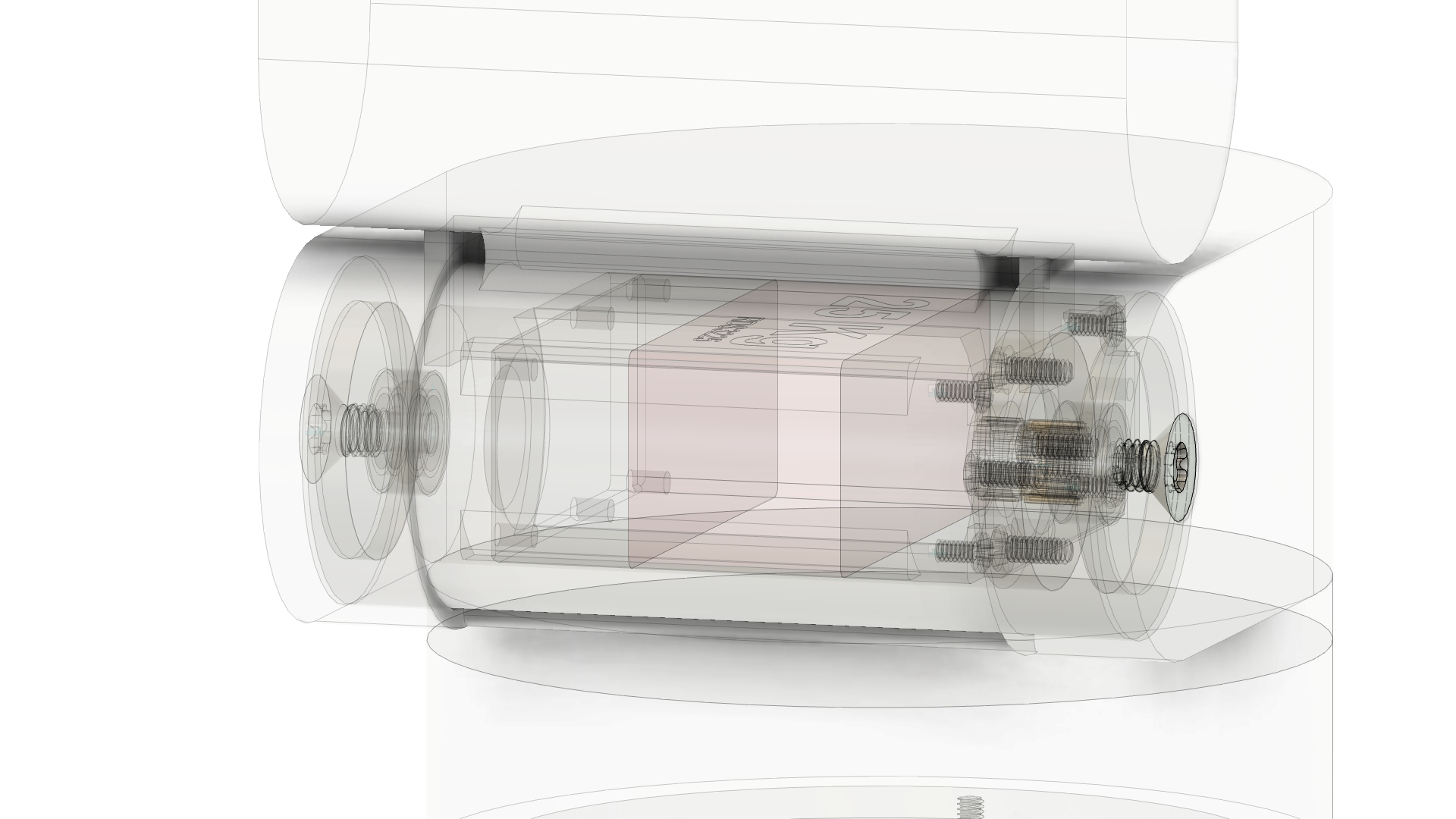
I decided to challenge myself to design the inner mechanism with minimal mechanical and physical building knowledge and experience. Because of the skinny size of the connector between two joints, I had to house the servo “outside” of the arm it’s controlling. After many iterations ( and of course, I forgot to take screenshots…), you can see the internal structure below. I’m still unsure if it will work in real life, but it works in my imagination.
I’m using screws and bearings directly from McMaster, so if one day I want to build this arm, they will come in handy. These are the parts I used.
