W9- Beambot
Ideation
Duncan, Kevin, and I teamed up for this beam bot project. We came up with a rough plan that includes a beam bot with two photoresistors: one pointing upwards, one pointing downwards. They are resting on a screen that the user controls. The user can choose to make different areas of the screen brighter.
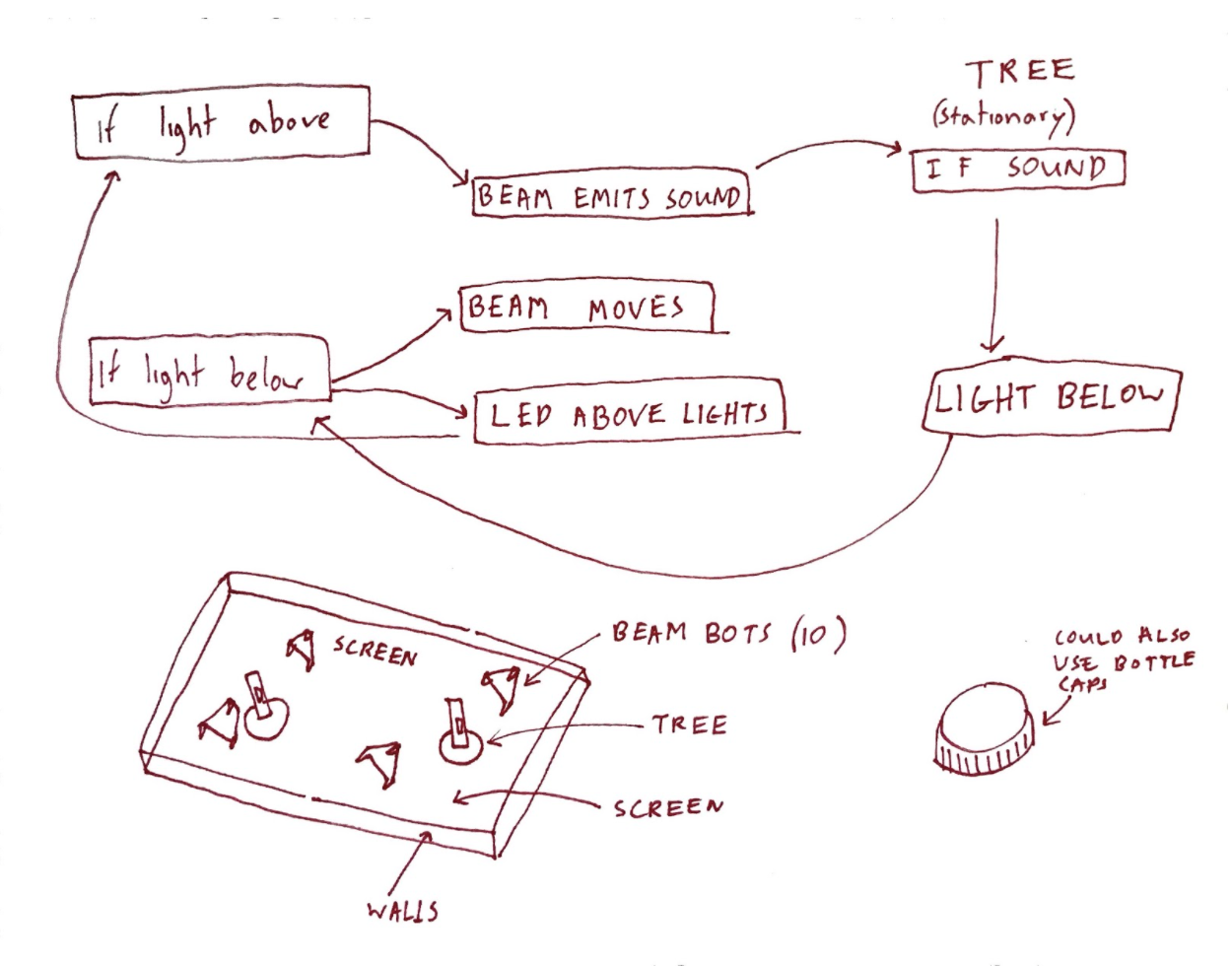
Later on, we came up with a more comprehensive plan that also involved a sound censoring tree that emits lights according to the volume of the surrounding sounds.
Here is our initial plan:

Since I'm in China, and two of them are in New York, I was in charge of the software part. Duncan was figuring out making beam bots, and Kevin designed the shell for beam bots.
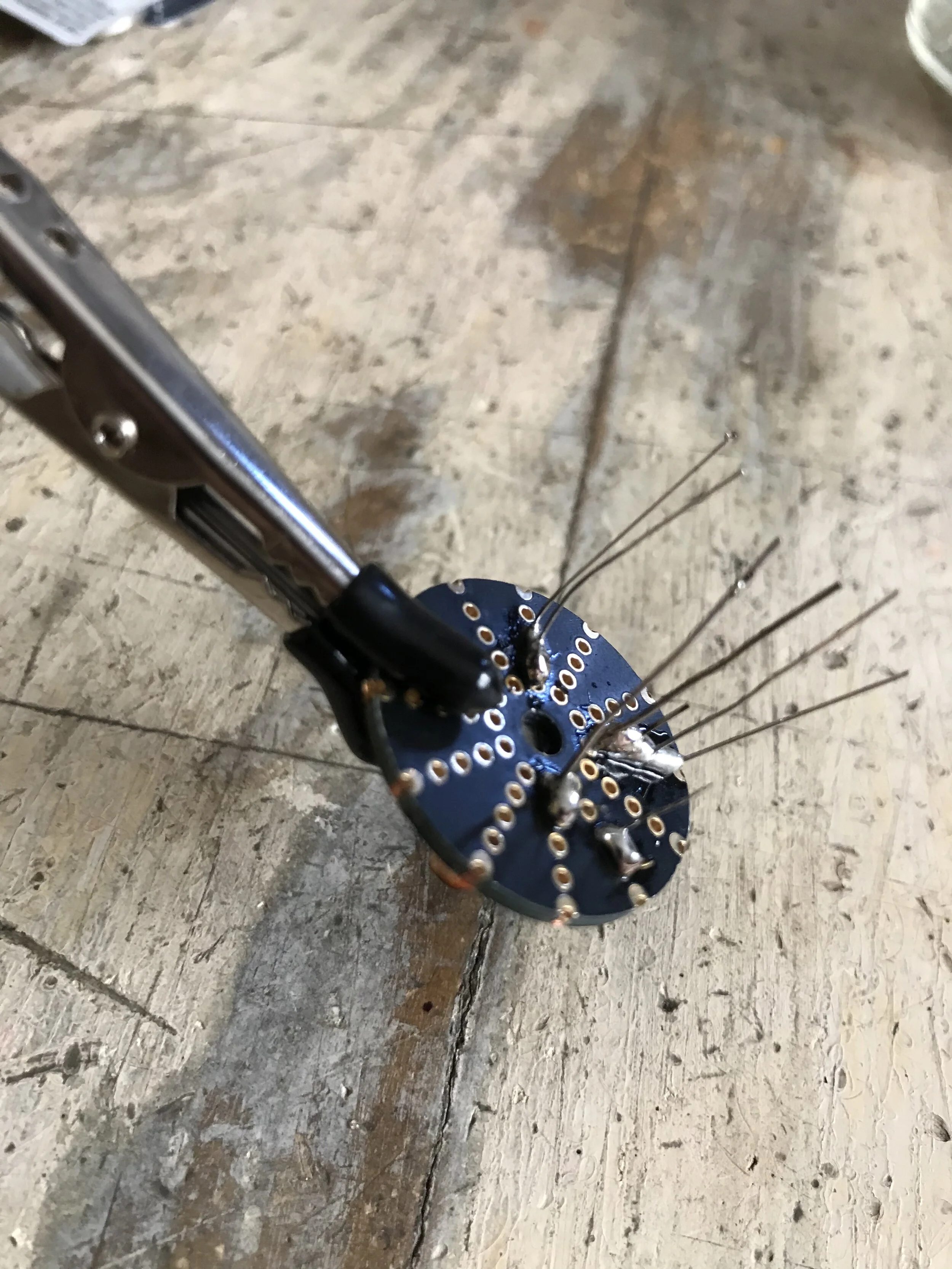
Due to technical difficulties, we found it later on during beam bot testing. We shifted our plan to using computer vision to replace the tree.
So here is our plan:
We will have a series of beam bots placed on a circle screen controlled by the user. Beam bots move when they sense lights. Users can place white dots that fade overtime on a black screen, hence dropping lights on the screen under the beam bot. There's a camera pointing down the screen and beam bots, sending a live video feed to the user while running computer vision. We track each beam bot's location in computer vision, calculate the distance to the center, and play the sound on that frequency. So when users drawing white dots on the screen, they move them around and change the sounds' pitches.





Computer Vision
We placed a bright spot on each beam bot, so the CV can track their locations and map them on the screen.